Theoretical Perspectives on Flow Matching & Diffusion Models (1)
ODE & SDE in Generative Models
前言:
在上一阶段的 Image Inpainting 课题中,我主要将 Diffusion Model 作为工具应用,虽然完成了工程任务,但对其背后的机理尚存一知半解。恰逢项目告一段落,我决定重新梳理相关理论。
本文主要基于 MIT 课程 6.S184 的内容,结合个人的理解整理而成。如有偏颇之处,欢迎指正交流。
1. Flow Models:从直觉到定义
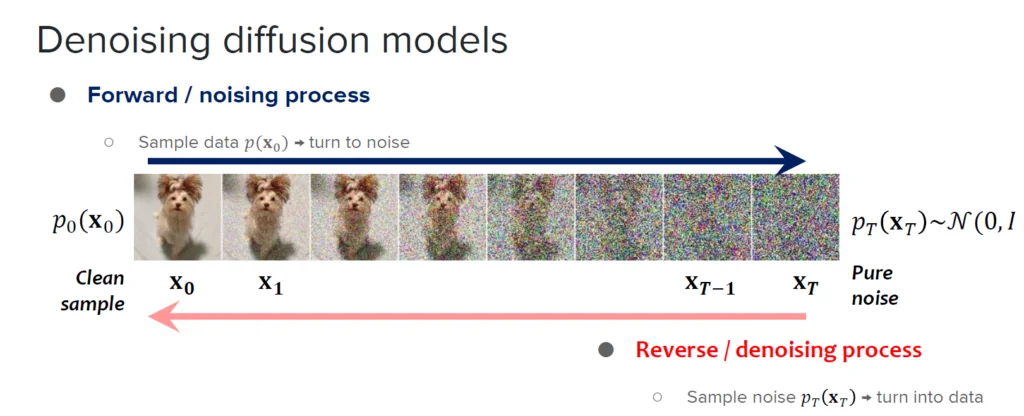
我们在图像生成领域对生成式模型(Generative Models)通常有一个直观的印象:模型从一个简单的先验分布(通常是高斯噪声,$x \sim \mathcal{N}(0, I)$)出发,经过逐步的去噪过程,将其转化为符合真实数据分布的样本(如下图粉色箭头所示)。
为了在 Flow Matching 的框架下严谨地讨论这个问题,我们首先对符号进行统一定义(注意:此处符号习惯遵循 Flow Matching 常用设定,与经典 DDPM 可能相反):
$$ \begin{align} & t : \text{时间变量,} t \in [0, 1] \\ & x_t : \text{生成过程中的中间状态} \\ & x_0 : \text{源分布(Source Distribution),即初始噪声} \\ & x_1 : \text{目标分布(Target Distribution),即真实数据} \end{align} $$1.1 向量场与 ODE (常微分方程)
从零开始思考生成过程:给定当前状态(如噪声图)$x_t$,我们需要一个机制来指导我们进入下一个时刻的状态 $x_{t+\Delta t}$。
直觉上,我们希望存在一张“地图”,在任意时刻、任意位置都能告诉我们移动的方向和速度。为了简化问题,我们假设这个变化只依赖于当前状态 $x_t$ 和时间 $t$,而不依赖于更早的历史状态。
在数学上,这种瞬时的变化率可以用常微分方程 (Ordinary Differential Equation, ODE) 来描述:
$$ \begin{align} \frac{d}{dt}X_t = u_t(X_t) \\ X_0 = x_0 \quad (\text{初始条件}) \end{align} $$这里的 $u_t(X_t)$ 就是我们所说的“地图”,学术上称为时间依赖的向量场(Time-dependent Vector Field),或者速度场(Velocity Field)。
Dr. Yang Song 在其论文中给出了清晰的可视化:
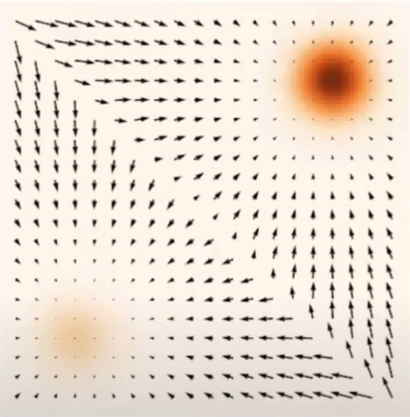
- 直观理解:想象 $x_t$ 是平面上的一个粒子,图中的黑色箭头表示向量场 $u_t$。在任意位置 $x_t$,向量场指导粒子以特定的速度和方向移动到下一个位置。
- 求解过程:生成数据的过程,本质上就是给定初始噪声 $x_0$,沿着向量场 $u_t$ 积分求解 $x_1$ 的过程。
下图展示了在时间维度上,粒子如何跟随“地图”演变:
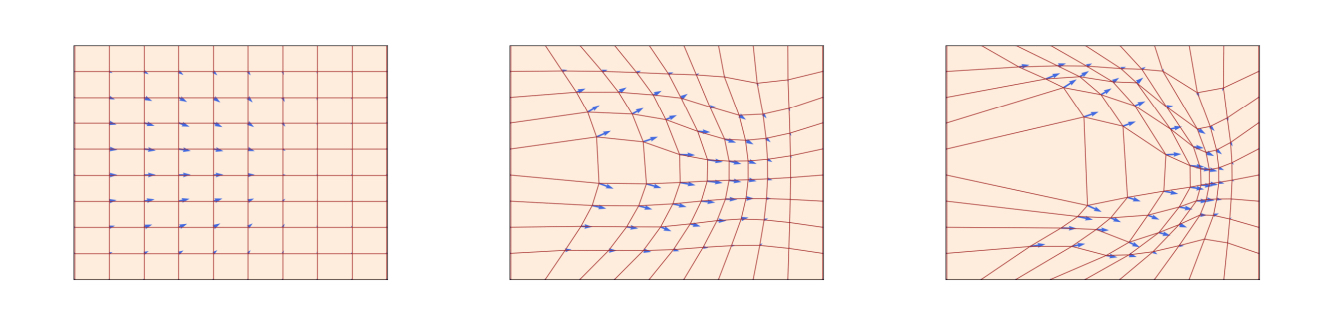
基于此观察,Flow Models 的核心思想在于:如果我们能训练一个神经网络来拟合这个向量场 $u_t(X_t)$,那么我们就能通过求解 ODE,将简单的噪声分布 $p_{0}$ 平滑地推演变换到复杂的数据分布 $p_{1}$。
示例:线性向量场
假设一个简单的向量场 $u_t(X_t) = -\theta X_t$,我们可以直接求出解析解:
$$ \frac{dX_t}{dt} = -\theta X_t \implies X_t = e^{-\theta t}x_0 $$
验证:$\frac{d}{dt}(e^{-\theta t}x_0) = -\theta e^{-\theta t}x_0 = -\theta X_t = u(X_t)$。
1.2 ODE 数值解法 (Euler Method)
在实际应用中,神经网络拟合的 $u_t(X_t)$ 通常高度非线性,无法求出解析解。因此,我们需要使用数值方法进行近似求解,最基础的方法即为欧拉法 (Euler Method)。
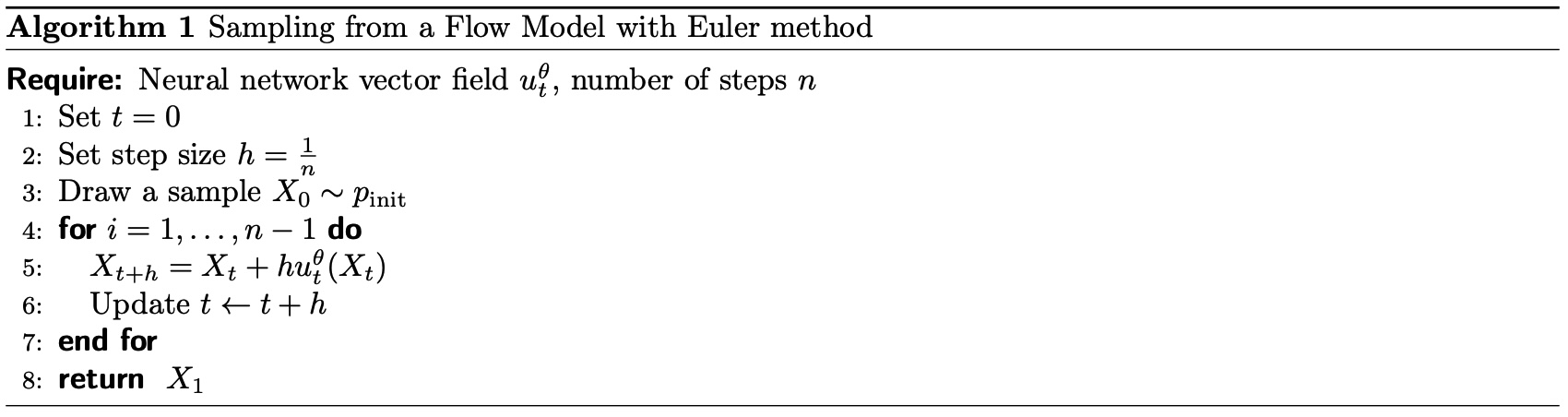
欧拉法本质上是用离散的折线来逼近连续的曲线。选取步数 $N$,步长 $h = \frac{1}{N}$,对于给定的初始状态 $X_0$,迭代公式如下:
$$ X_{t+h} = X_t + h \cdot u_t(X_t) , \quad t \in \{0, h, 2h, \dots, 1-h\} $$1.3 Flow Models 算法总结
至此,我们可以将 Flow Models 的生成过程(Inference)总结为以下算法:学习到一个向量场 $u_t$,并将简单分布 $X_0 \sim p_{\text{init}}$ 映射到目标分布 $X_1 \sim p_{\text{data}}$。
2. Diffusion Models 与 SDE
在 Flow Models 中,我们构建了确定性的轨迹。对于固定的 $X_0$,生成的 $X_1$ 是唯一的。但在 Diffusion Models 的视角下,我们引入了随机性,这便涉及到了 SDE (随机微分方程)。
2.1 为什么引入 SDE?
从 ODE 到 SDE 的转变主要基于以下考量:
- 多样性与覆盖率:确定性的映射在某些情况下可能无法覆盖目标分布的所有模式(Modes)。
- 误差修正:在数值求解过程中,欧拉法会产生离散化误差。ODE 轨迹一旦偏离,无法自我修正;而 SDE 引入的噪声项(配合某些漂移项)可以起到“将偏离的轨迹拉回来”的作用,具有更强的鲁棒性。
2.2 SDE (Stochastic Differential Equation) 定义
我们将 ODE 中的确定性方程扩展为包含随机项的 SDE:
$$ \begin{align} dX_t &= u(X_t, t)dt + \sigma_t dW_t \\ X_0 &= x_0 \end{align} $$其中:
- $u(X_t, t)dt$ 是 漂移项 (Drift term),对应原来的确定性向量场,控制整体运动趋势。
- $\sigma_t dW_t$ 是 扩散项 (Diffusion term), $\sigma_t$ 是控制噪声强度的系数。
- $W_t$ 代表 布朗运动 (Brownian Motion)(或维纳过程 Wiener Process)。
直观上,布朗运动具有独立增量特性:对于任意 $0 \le s < t$,增量 $W_t - W_s$ 独立于过去的状态,且服从高斯分布:
$$ W_t - W_s \sim \mathcal{N}(0, (t-s)I) $$2.3 SDE 数值解法 (Euler-Maruyama)
对应于 ODE 的欧拉法,SDE 的数值求解通常使用 Euler-Maruyama 方法。
给定漂移项 $u(X_t)$ 和扩散系数 $\sigma_t$,步长 $h = \frac{1}{N}$,更新公式为:
注意:随机项缩放系数是 $\sqrt{h}$ 而非 $h$,这是由布朗运动的方差性质决定的($\text{Var}(dW) \propto dt$)。
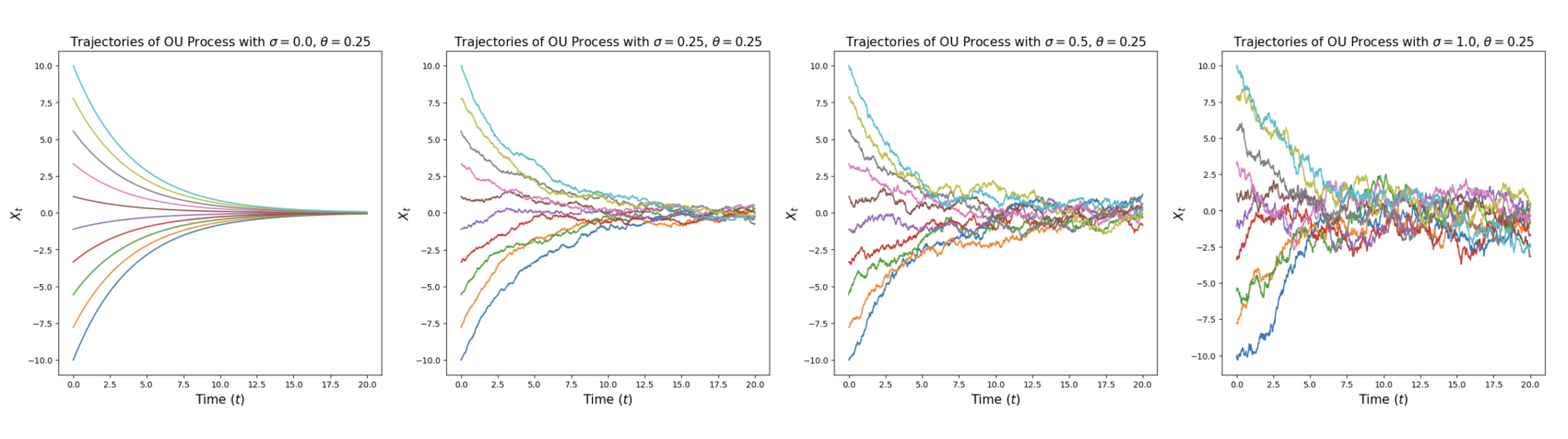
注:Ornstein-Uhlenbeck (OU) 过程
值得一提的是,当漂移项为线性形式(如 $u(X_t) = -\theta X_t$)时,该 SDE 被称为 Ornstein-Uhlenbeck (OU) 过程。
$$ dX_t = - \theta X_t dt + \sigma_t dW_t $$
这种过程具有均值回归(Mean-reverting)的特性,常用于描述粒子在摩擦力作用下的布朗运动,也是许多 Diffusion 模型的前向过程基础。
2.4 可视化对比:ODE vs SDE
如果我们对上述例子进行可视化(如下图 Lab1 所示),可以直观地看到两者的区别:
- ODE:轨迹平滑、确定,粒子沿着流线移动。
- SDE:轨迹抖动、随机,粒子在宏观趋势上移动的同时,伴随着微观的布朗运动。